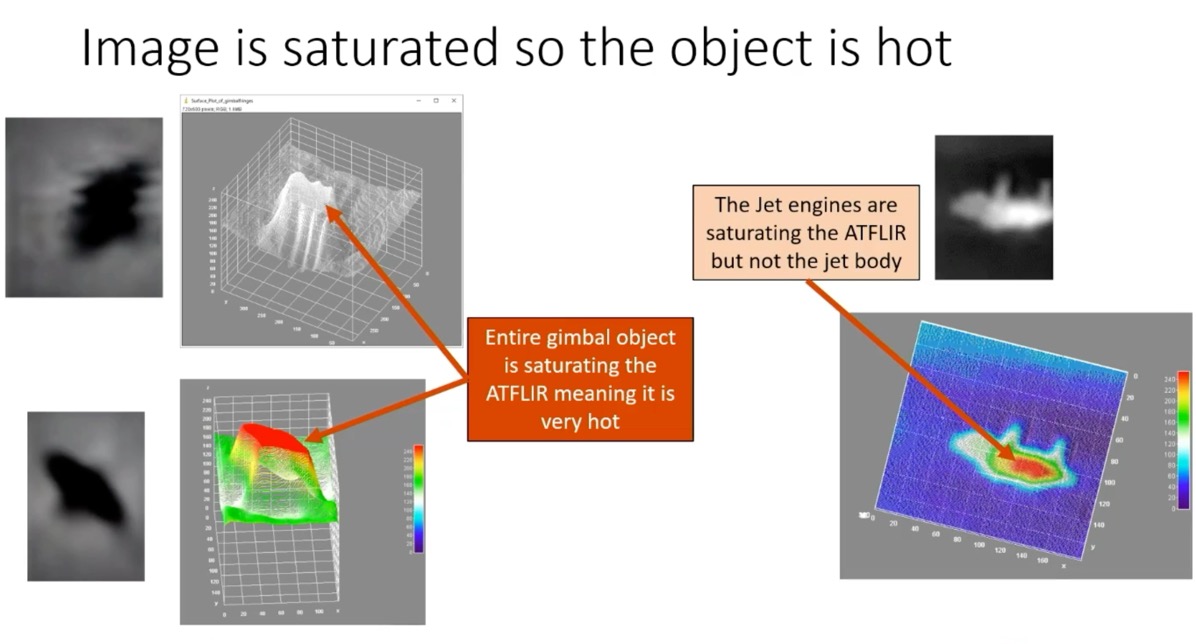
1- The sensor is NOT measuring the radiance emitted from the object, but the irradiance received by the sensor. Which is an obvious statement, but sometimes it is necessary to make explicit the difference between both quantities. They are of course related through the distance, solid angles and other stuff, so having the latter, the former can be calculated (IF the other stuff is known). That’s what he is trying to do.
2- The calculation is basically: I have a maximum irradation the sensor can detect (the saturation) ... Read even more